//
// machine.ino - voltage rectifier and integrator circuit
// for the DT009/1 EEPP build-a-machine project
// Written by Ted Burke, 11-2-2019
//
unsigned long t_start, t1, t2;
int n;
void setup()
{
pinMode(2, OUTPUT);
pinMode(3, OUTPUT);
Serial.begin(9600);
for(n=0 ; n<3 ; ++n)
{
digitalWrite(3, HIGH);
delay(200);
digitalWrite(3, LOW);
delay(800);
}
for(n=0 ; n<25 ; ++n)
{
digitalWrite(3, HIGH);
delay(20);
digitalWrite(3, LOW);
delay(20);
}
digitalWrite(2, HIGH);
digitalWrite(3, LOW);
t_start = micros();
t1 = t_start;
t2 = t_start;
}
void loop()
{
int v1, v2, v_rect;
double Vs = 0;
while(1)
{
v1 = analogRead(6);
v2 = analogRead(7);
v_rect = v1 > v2 ? v1 : v2;
t2 = micros();
Vs += (t2 - t1) * 1e-6 * v_rect * (5.0 / 1023.0);
t1 = t2;
//Serial.print("0 1024 ");
Serial.print(v1);
Serial.print(" ");
Serial.print(v2);
Serial.print(" ");
Serial.print(v_rect);
Serial.print(" ");
Serial.println(Vs);
if (t2 - t_start > 10000000L) break;
}
digitalWrite(2, LOW);
for(n=0 ; n<75 ; ++n)
{
digitalWrite(3, HIGH);
delay(20);
digitalWrite(3, LOW);
delay(20);
}
while(1)
{
Serial.print("Integrated output voltage = ");
Serial.print(Vs);
Serial.println(" Vs");
digitalWrite(3, HIGH);
delay(200);
digitalWrite(3, LOW);
delay(800);
}
}
Author: batchloaf
Coil Gun Competition Final Scoreboard

Review week: MOSFETs, flyback diodes, capacitors, oscilloscope, optical sensors – whiteboard snapshots
This week, we discussed various elements of the coil gun project including MOSFET load control, flyback diodes, capacitance/capacitors, oscilloscopes, and the use of optical sensors to control the timing of pulses to the coils by tracking the movement of the slug through the barrel.


Introduction to op-amps – whiteboard snapshots


Design choices in coil gun project – whiteboard snapshots
In today’s class, we discussed design parameters for the coil gun. We drew up a list, considered how teams might be able to fix some design choices and then carry out experiments to guide their decisions on others.


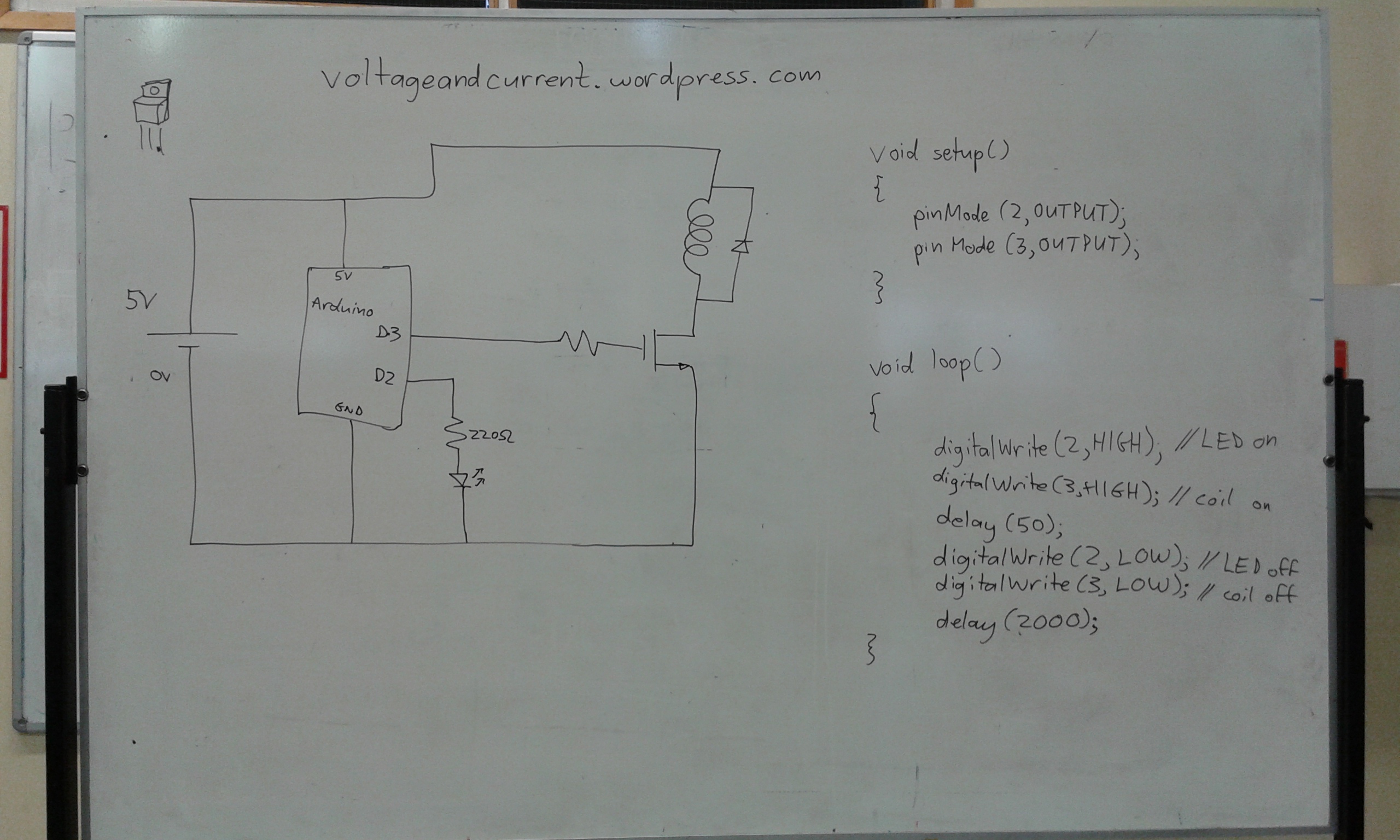
Example Arduino circuit and program to pulse coil periodically
The following circuit and program will pulse the electromagnetic coil for 50ms every couple of seconds.
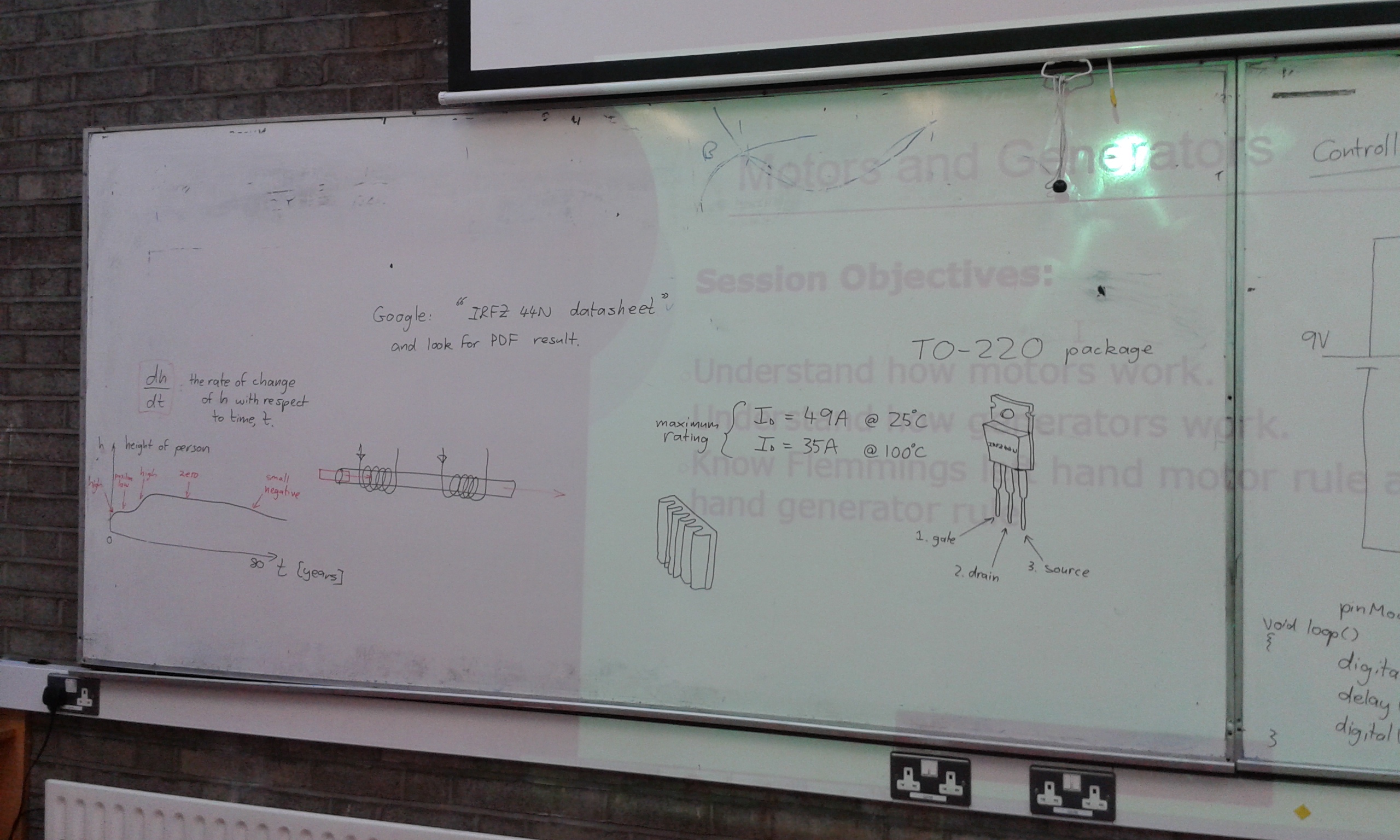
Controlling electrical loads with Arduino and MOSFET – whiteboard snapshots
These are whiteboard snapshots from yesterday’s 9am lecture (Wednesday 17th Oct 2018) in KEG-036.

Smuggler’s Challenge Final Scoreboard

Example video:
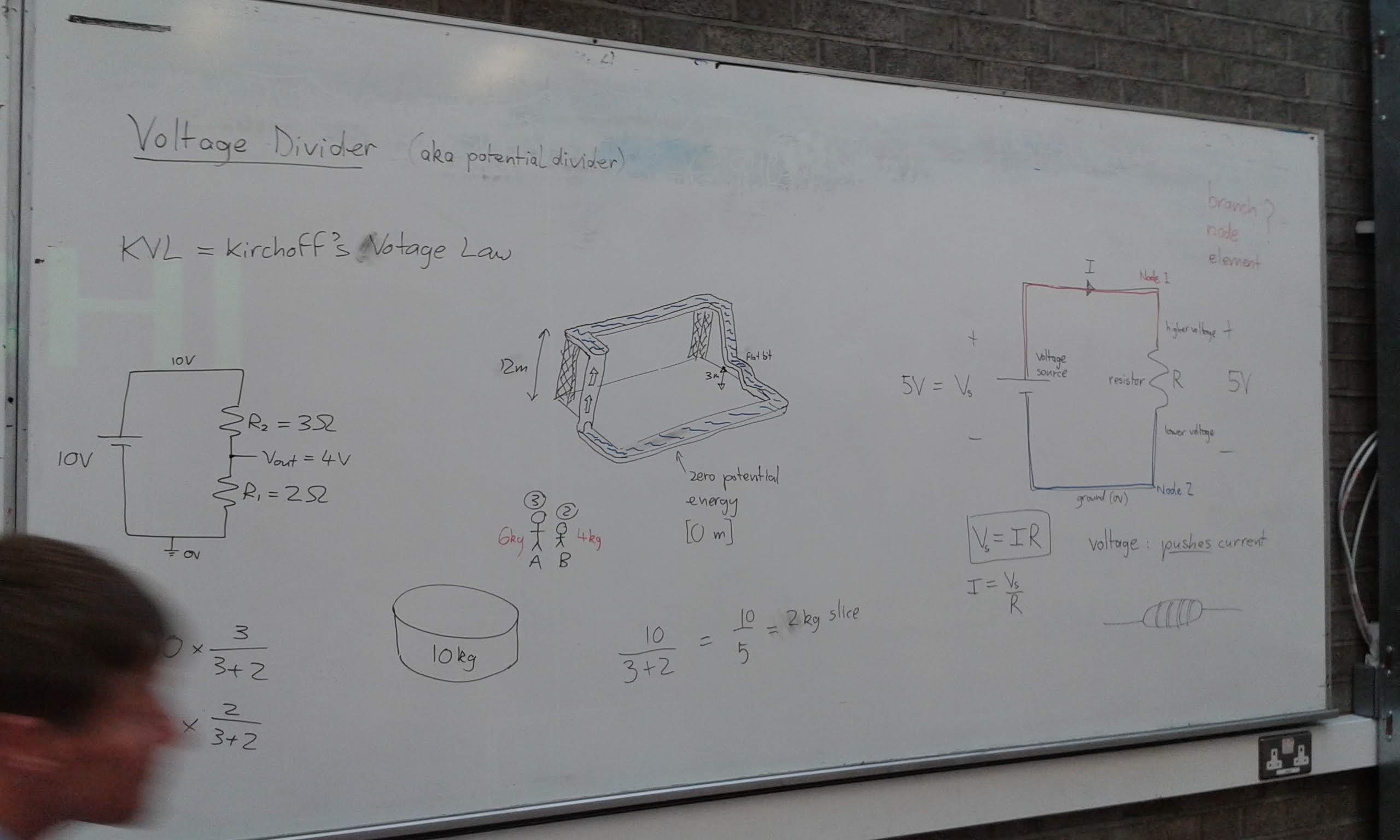
Voltage divider fundamentals – whiteboard snapshots from lecture in KEG-036

Random voltage generation and current measurement for Smuggler’s Challenge
//
// smugglers.cpp
// Arduino Nano random voltage generator and 1 mA
// current tester for EEPP Smugglers' Challenge.
//
// Written by Ted Burke, last updated 2-10-2018
//
#include <Servo.h>
Servo myservo;
#define LEDPIN 2
#define PWMPIN 3
#define SERVOPIN 9
void setup()
{
// Generate random output voltage between (approximately) 0.5 and 2.0 V on pin D3
int vout;
randomSeed(analogRead(0));
vout = random(25, 100);
pinMode(PWMPIN, OUTPUT);
analogWrite(PWMPIN, vout);
// Red and green LEDs are both on pin D8 (set D8 high for green, low for red)
pinMode(LEDPIN, OUTPUT);
// Use internal 1.1 V voltage reference for analog input
analogReference(INTERNAL);
// The measured current is printed in mA
Serial.begin(9600);
// Initialise servo motor on pin D9
myservo.attach(SERVOPIN);
}
void loop()
{
float I_mA;
// Calculate current from current sensing voltage on pin A7
I_mA = (2.0*1.1/1023.0)*analogRead(A7);
// Print measured current
Serial.print(I_mA);
Serial.println(" mA");
// Check if measured current is within tolerance of target (1 mA)
if (I_mA > 0.95 && I_mA<1.05)
{
// Light green LED and move servo to open position
digitalWrite(LEDPIN, HIGH);
myservo.write(45);
}
else
{
// Light red LED and move servo to closed position
digitalWrite(LEDPIN, LOW);
myservo.write(135);
}
// Update once every second
delay(1000);
}
